
Give all kinds of terminals intelligent three-dimensional perception capabilities
Provide accurate and stable 6DOF space perception capabilities for various intelligent terminals, allowing users to avoid complex, time-consuming and labor-consuming perception algorithm development
Based on multi-source fusion perception + spatial calculation, the system outputs real-time spatial perception information such as depth map, 6FOF position and posture
Help various terminals to realize independent positioning, navigation, obstacle avoidance, map construction and other functions
Scanning and sensing the surrounding environment in motion. The image information, depth information and inertial information provided by multiple sensors are fused to build a 3-dimensional semi-dense point cloud map, which constructs a basic outline of the surrounding environment.
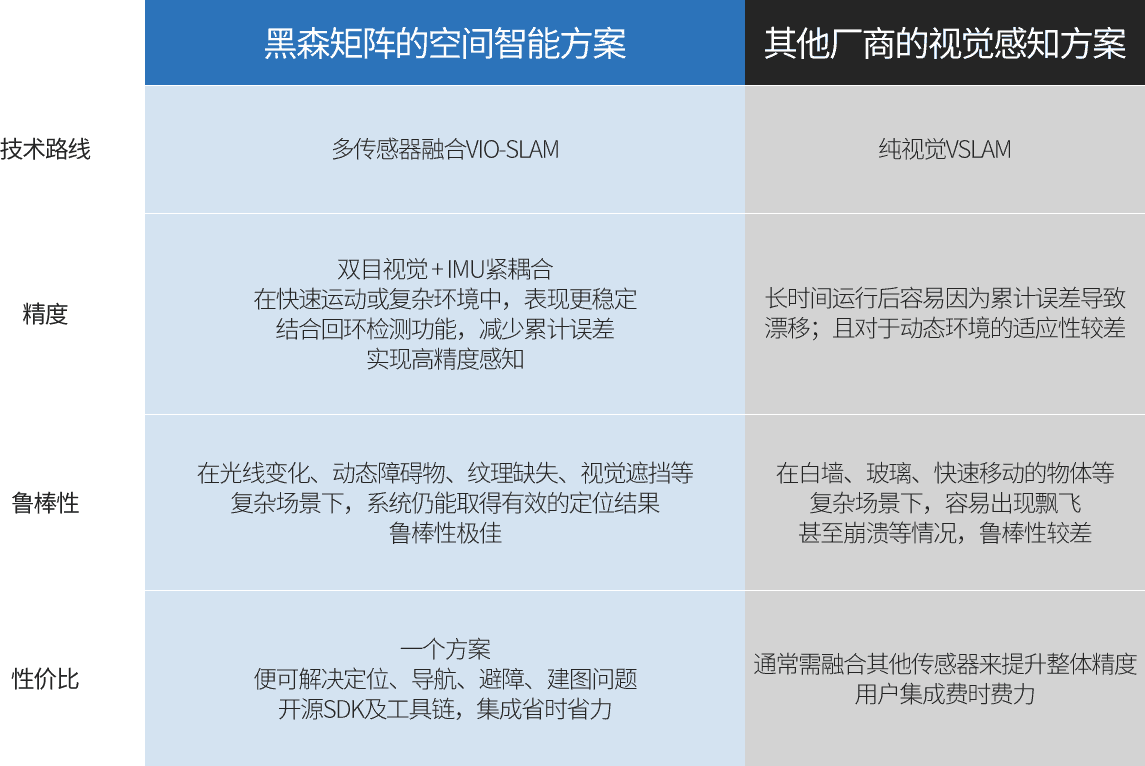
Fusion of multi-sensor data for high-speed computation of real-time 3-dimensional position of the device in the built-up environment. Combined with the loopback detection function to minimize the cumulative error in operation.
With the binocular depth map, the obstacles ahead can be accurately sensed, providing accurate data for the obstacle avoidance algorithm.
Provides path planning routines. Combining real-time localization and map-building data enables rapid development of autonomous robot navigation algorithms.
Extreme performance
Through practical training in multiple different real business scenarios, the system continuously optimizes the selection of generations
All performance indicators are at the industry-leading level, easily cope with all kinds of challenges, and are born for innovation and exploration
Accuracy
Binocular vision + IMU tight coupling
Real-time output of accurate three-dimensional data (depth map, pose, etc.)
Robustness
VIO
Robust VIO system without fear of environmental interference
Adapt to various extreme situations (high light, weak lines
Repeat, texture repetition, jitter, impact, etc.)
Comprehensively ensure robot operation accuracy
Performance Score
STEREO3
Extreme performance
Strong earthquake resistance \ Low delay \ High frame rate \ High precision
Extremely high accuracy in measuring large outdoor scenes
Space intelligence is within reach
The system opens the SDK, fully open source tool chain, helping users to quickly develop and deploy
Provide more cost-effective space perception solutions for applications in various industries
Rich transmission interfaces
RJ45、USB2.0/3.0、Type-C
CAN、I2C、UART、EMMC
SDK is open
Open root permissions and Ubuntu 20.04 running environment
Users can compile SLAM algorithms and planning algorithms by themselves
Open Source Toolchain
Support system: windows/linux transmission
Protocol: TCP/ROS1/ROS2
